How is the current controlled with a hub motor and controller, so the duty cycle controls voltage by the length of the duty cycle and that is fed through capacitors to smooth it out but in a hill climbing situation where the motor is bogged down at a slow speed and using maximum power and we know that a lot of hill climbing leads to a much more limited range from the battery pack. It feels like when the duty cycle is low and there isn't much voltage going to the motor there isn't much current either. How is the controller drawing more current for hill climbing or is the torque created only related to voltage? So when the motor is bogged down climbing a steep hill is voltage just transformed from speed to torque somehow? Hill climbing takes a lot more power than just going fast on a flat surface at the maximum assistance speed. Is the duty cycle 100% for hill climbing but significantly less for providing the maximum assistance speed of 15.5mph?
How does it all work with a direct drive hub motor where they can work from about 200W to 2000W and voltage means much higher speeds but torque is often much more limited in its improvement, what can be 10x as much wattage might only mean a 50% improvement in torque i.e. 30Nm to 45Nm? Does this prove your point in that voltage provides speed control but current control is very limited.
I must admit I can't quite get my head around the overall picture because I'm struggling to think of voltage as torque I guess.
So if an ebike was going along at 15.5mph on the flats and then hits a huge hill and it now could only generate a speed of 5mph, what is the controller doing in those circumstances? Maximising the duty cycle at 100% and re-timing the synchronisation of the hub motor for torque?
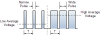
I think you have it the wrong way round. The voltage is fixed by the battery, and the current is given by the duty. You talk about average values, but in that case it's better to see each pulse ASAP pulse of energy, height times width giving Joules. The battery voltage is very relevant because it works in conjuction with the back emf to have an effect on power and maximum speed.
Forget about the main capacitor. It's not so much for smoothing as giving the instant current needed for each pulse to aid the battery.
The more current when going slow and less current when going fast is a direct result of the back emf. It's the net voltage (battery voltage minus back emf) that pushes current into the motor. As the motor speeds up, the effective height of each pulse reduces.
When you increase the battery voltage, the height of each pulse increases directly, so there's more energy per pulse to increase the torque.
My explanation is not strictly scientifically correct, but gives a layman's view so that you can see cause and affect. What happens inside the motor is extremely complicated, but, as I said earlier, we can see how much energy comes out of the controller.



 MTF Enterprises announces acquisition of EMU Electric Bikes
MTF Enterprises announces acquisition of EMU Electric Bikes Wisper 806T folding bike wins Which? ‘Best Buy’
Wisper 806T folding bike wins Which? ‘Best Buy’ Sustrans calls for protected cycle lanes
Sustrans calls for protected cycle lanes Amazon launch their first UK e-cargo micromobility hub
Amazon launch their first UK e-cargo micromobility hub